軸受に作用する荷重としては、軸受の支える物体の質量による力、歯車やベルトなどの伝動力及び運転中の機械に生じる荷重などがある。
これらの荷重を簡単な計算によって決定できる場合は非常に少ない。なぜならば、荷重は一定でなく変動する場合が多く、かつこの変動はその程度や大きさを決めることが困難な場合が多いからである。従って、軸受に作用する荷重を求めるには、理論的に計算できる数値に、経験に基づいて得た各種の係数を乗じて求める方法が採られている。
5-3-1 荷重係数
軸受に作用するラジアル荷重やアキシアル荷重が一般の力学計算により求められても、実際に軸受に作用する荷重は、機械の振動や衝撃によって計算値よりも大きくなるので、次式のように理論上の値に荷重係数を乗じて求めることが多い。

表 5-6 荷重係数ƒwの値
| 運転条件 | 例 | ƒw |
|---|---|---|
| 振動・衝撃がほとんどない場合 | 電動機 | 1.0~1.2 |
| 工作機械 | ||
| 計器類 | ||
| 普通の運転の場合 (軽い衝撃) |
鉄道車両 | 1.2~2.0 |
| 自動車 | ||
| 製紙機械 | ||
| 送風機 | ||
| コンプレッサ | ||
| 農業機械 | ||
| 強い振動・衝撃がある場合 | 圧延機 | 2.0~3.0 |
| 粉砕機 | ||
| 建設機械 | ||
| 振動ふるい機 |
5-3-2 ベルト又はチェーン伝動の場合の荷重
ベルト伝動の場合、プーリ軸に作用する理論上の荷重はベルトの有効伝動力を求めればよい。
しかし、実際には、この有効伝動力に、機械の運転中の振動・衝撃を考慮した荷重係数(ƒw)、さらにベルトの張力を考慮したベルト係数(ƒb)を乗じて求める必要がある。
また、チェーン伝動の場合もベルト係数に相当する係数を乗じて求める必要があり、これらを式(5-13)に示す。
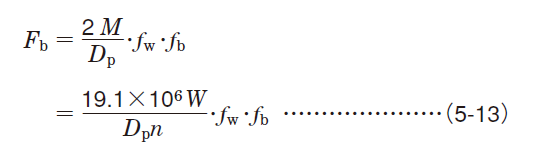
表 5-7 ベルト係数ƒbの値
| ベルトの種類 | ƒb |
|---|---|
| タイミングベルト(歯付きベルト) | 1.3~2.0 |
| Vベルト | 2.0~2.5 |
| 平ベルト(テンションプーリ付き) | 2.5~3.0 |
| 平ベルト | 4.0~5.0 |
| チェーン | 1.2~1.5 |
5-3-3 歯車伝動の場合の荷重
(1)歯車に作用する荷重と歯車係数
歯車伝動の場合、歯車に作用する理論上の荷重には、接線方向荷重(Kt)・半径方向荷重(Kr)・軸方向荷重(Ka)があり、それぞれ伝動力と歯車の種類により力学的((2)項 

 )に求めることができる。
)に求めることができる。
しかし、実際の歯車荷重はこれらの理論上の荷重に、機械の運転中の振動・衝撃を考慮した荷重係数(ƒw 表5-6)、さらに歯車の仕上げを考慮した歯車係数(ƒg 表5-8)を乗じて求める必要がある。
表 5-8 歯車係数ƒgの値
| 歯車の種類 | ƒg |
|---|---|
| 精密歯車 (ピッチ誤差、歯形誤差とも0.02mm以下) |
1.0~1.1 |
| 普通歯車 (ピッチ誤差、歯形誤差とも0.1mm以下) |
1.1~1.3 |
(2)歯車に作用する荷重の算定
 接線方向荷重(接線力)Kt 接線方向荷重(接線力)Kt |
|---|
(平歯車、はすば歯車、やまば歯車、すぐばかさ歯車、まがりばかさ歯車)
 |
 半径方向荷重(分離力)Kr 半径方向荷重(分離力)Kr |  軸方向荷重(アキシアル力)Ka 軸方向荷重(アキシアル力)Ka | ||
|---|---|---|---|
| 平歯車 |
 |
0 | |
| はすば歯車 |
 |
 |
|
| やまば歯車 |
 |
0 | |
| すぐば かさ歯車1) | 駆動側 |
 |
 |
| 従動側 |
 |
 |
|
| まがりば かさ歯車1,2) | 駆動側 |
 |
 |
| 従動側 |
 |
 |
|
〔注〕
1)添付1は駆動側の歯車を示し、添付2は従動側の歯車を示す。
2)正負符号の区分は(上段:右ねじれ時計方向回転、又は左ねじれ反時計方向回転のとき、下段:右ねじれ反時計方向回転、又は左ねじれ時計方向回転のとき)を示す。
〔備考〕回転方向はピッチ円すい角の頂点の背面から見た場合の方向をいう。
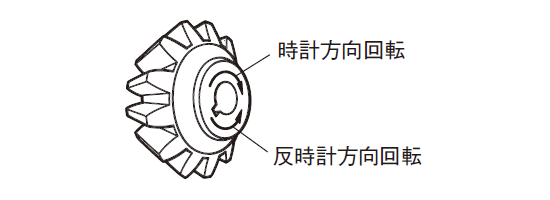
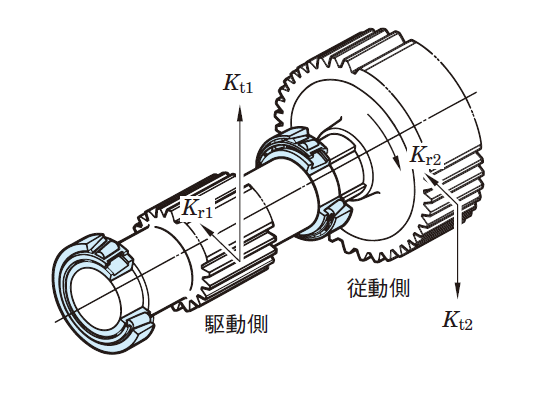
図 5-7 平歯車に作用する荷重
図 5-8 はすば歯車に作用する荷重
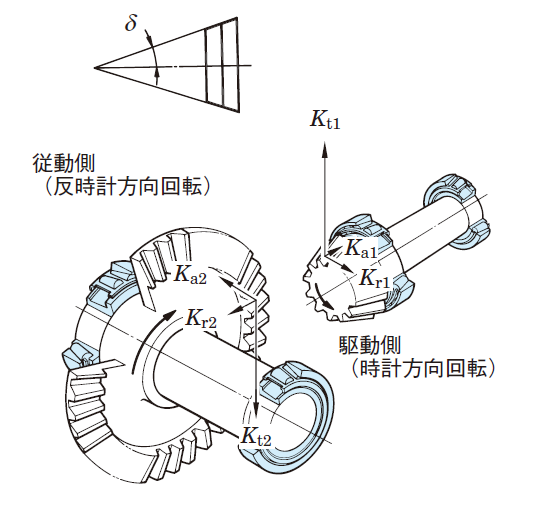
図 5-9 すぐばかさ歯車に作用する荷重
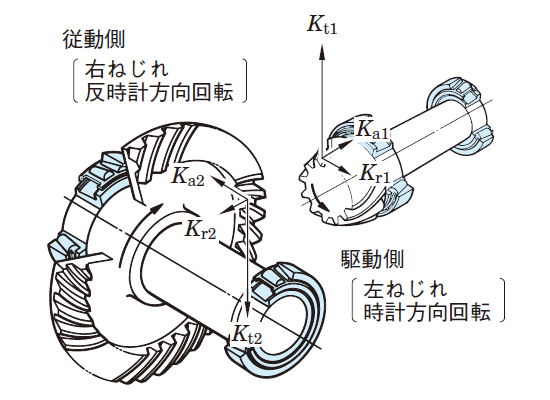
図 5-10 まがりばかさ歯車に作用する荷重
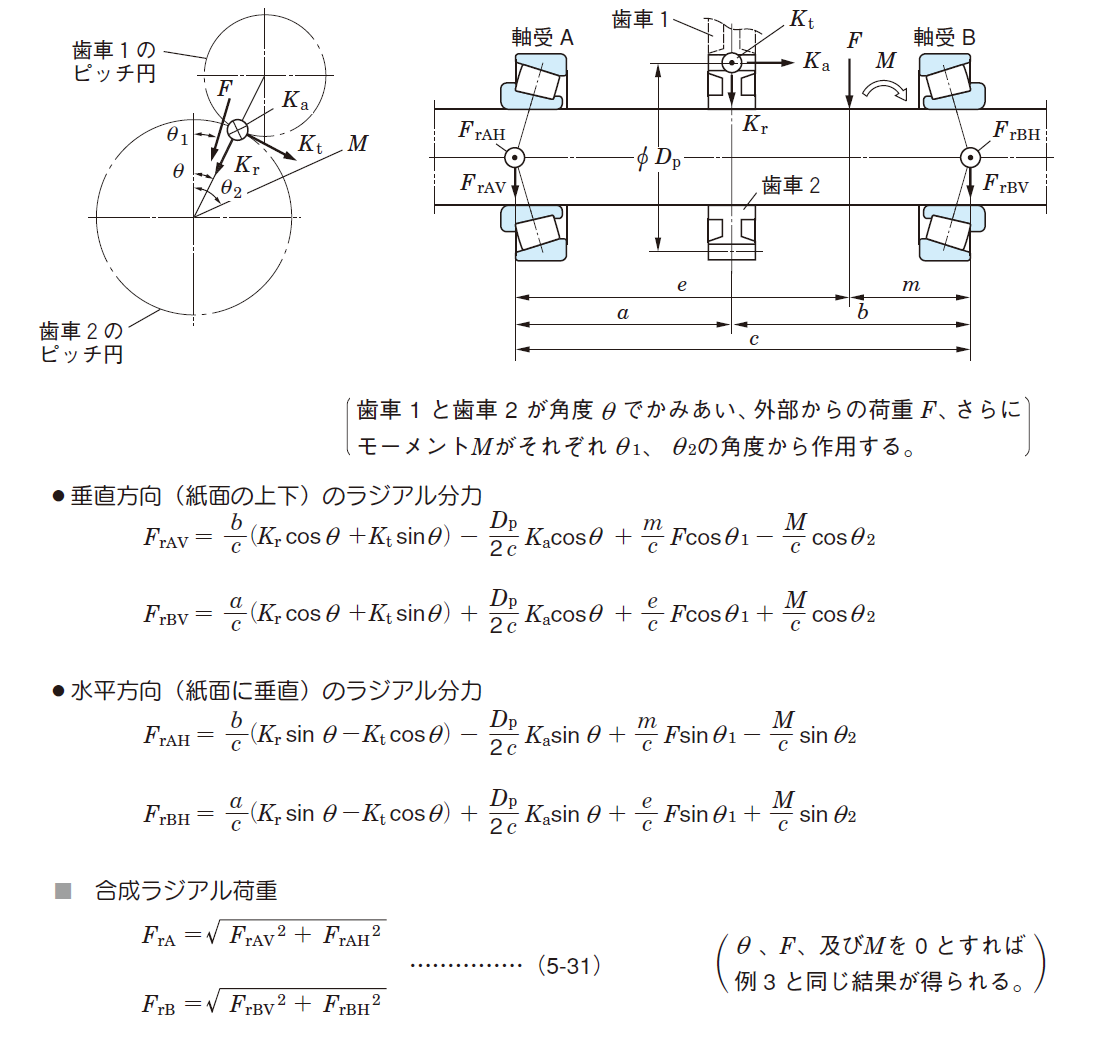
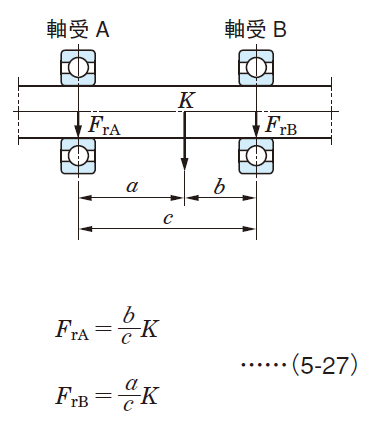
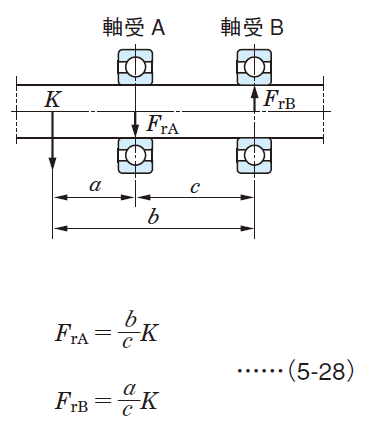
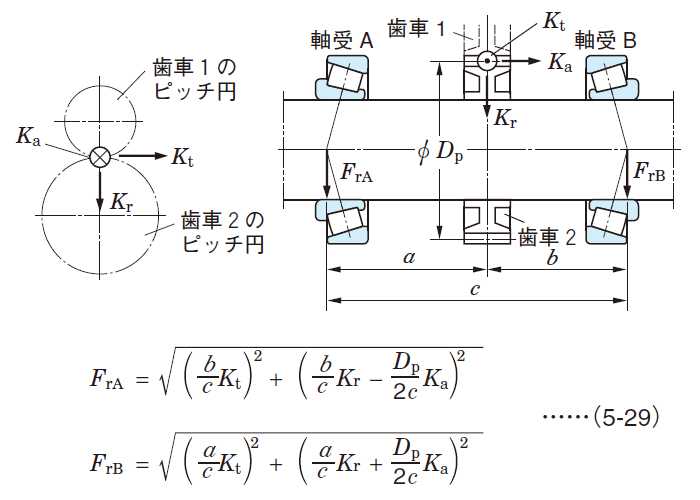
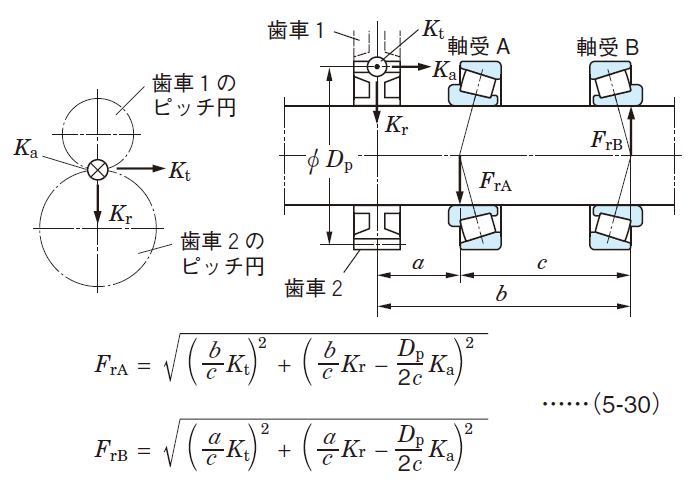
5-3-4 軸受への荷重配分
軸系に作用する荷重を、それらを支持する軸受に配分するためには、それぞれの荷重のラジアル分力を求めてから、荷重の方向に従ってそのベクトル和を求めればよい。
ラジアル荷重の配分例を次に示す。
〔備考〕
例3~5の軸受には、外部(歯車)からのアキシアル荷重Ka、及びラジアル荷重の負荷によって生じる軸方向の分力が作用する。
この場合のアキシアル荷重の求め方は『動等価荷重のページ』をご参照ください。
(例1~例5において、)
例1 基本(1)
例2 基本(2)
例3 歯車荷重の配分(1)
例4 歯車荷重の配分(2)
例5 歯車荷重と他の荷重が同時に作用する場合